Robotic Oceanographic Surface Sampler
Oregon State University
College of Earth, Ocean, and Atmospheric Sciences
Ocean Mixing Group




Summary
Timeline
Started
Joined ROSS
Setup & Ocean Trials
Petersburg, AK
Glacier Deployment #1
LeConte Glacier, AK
Glacier Deployment #2
LeConte Glacier, AK
Scientific Paper Published
The Oceanographic Society
Finished
Left ROSS
Key Takeaways
- Hand assembled and validated dozens of custom PCBs, wiring harnesses, and electronics boxes
PCBs
Printed circuit boards
- Wrote, debugged, and assisted with development of embedded firmware
- Accompanied the team on two deployments to the LeConte glacier in Alaska to gather ice-water melt and mixing data
Relevant Skills
Electrical
- Schematic & PCB Design
- Altium Designer
- PCB Assembly & Rework
- Handheld Soldering
- Handheld Hot-Air Reflow
- Oven Reflow
- Electrical Diagnostics
- Multimeters
- Oscilloscopes
- Logic Analyzers
- Harnessing Fabrication
- DC Power & Signal
- Low Frequency RF (<1GHz)
- Waterproofing
- Simulation
- LTspice
Software & Environments
- Git
- Programming
- Python 2/3
- Bash Shell Scripting
- Low-Level Embedded C/C++ (Atmel Studio)
- High-Level Embedded C/C++ (Arduino/Teensy)
- Matlab
- Operating Systems
- Linux
- Ubuntu
- Raspbian
- Microsoft Windows
- Linux
Details
ROSS Overview
ROSS was a gasoline-powered water-sampling robotics platform built
around a Mokai jet-drive kayak. It's purpose was to continuously, and
often autonomously, gather water data over extremely long distances
and/or in locations where human-safety concerns would make gathering
it manually too risky. There were a variety of sensors it could be
outfitted with depending on the needs of the exact research project
and destination, but some common ones were an ADCP for gathering 3D water current vector data, a CTD for measuring water conductivity/temperature/depth, and a high-precision
GPS for generating meaningful 3D plots of the sensor data. These kayaks
have been deployed to places like the Indian/Pacific Ocean mixing line,
and along the active LeConte glacier terminus in Alaska, gathering novel
data on how vastly different bodies of water act when mixing.
ADCP
Acoustic doppler current profiler
CTD
Conductivity, temperature, and depth sensor
In its original configuration, the Mokai kayak's throttle and steering
were already drive-by-wire, which made it an excellent starting point
for automating. It was also designed for easy transport, breaking down
into three major compartments that could easily fit in the back of a
short-bed pickup. For our custom hulls, Mokai also thickened the
plastic significantly and provided a bare minimum of electronics. This
barebones platform was then modified by our team to include a
storm-surge-rated intake and exhaust for the engine, a keel to improve
rough sea stability, a large alternator, and a plethora of mount
points the electronics, batteries, fuel, sensors, and radios.
In terms of the electronics and software for this project, the kayak
itself was centered around a Pixhawk flight controller flashed with a
modified Rover variant (this was before a dedicated boat option
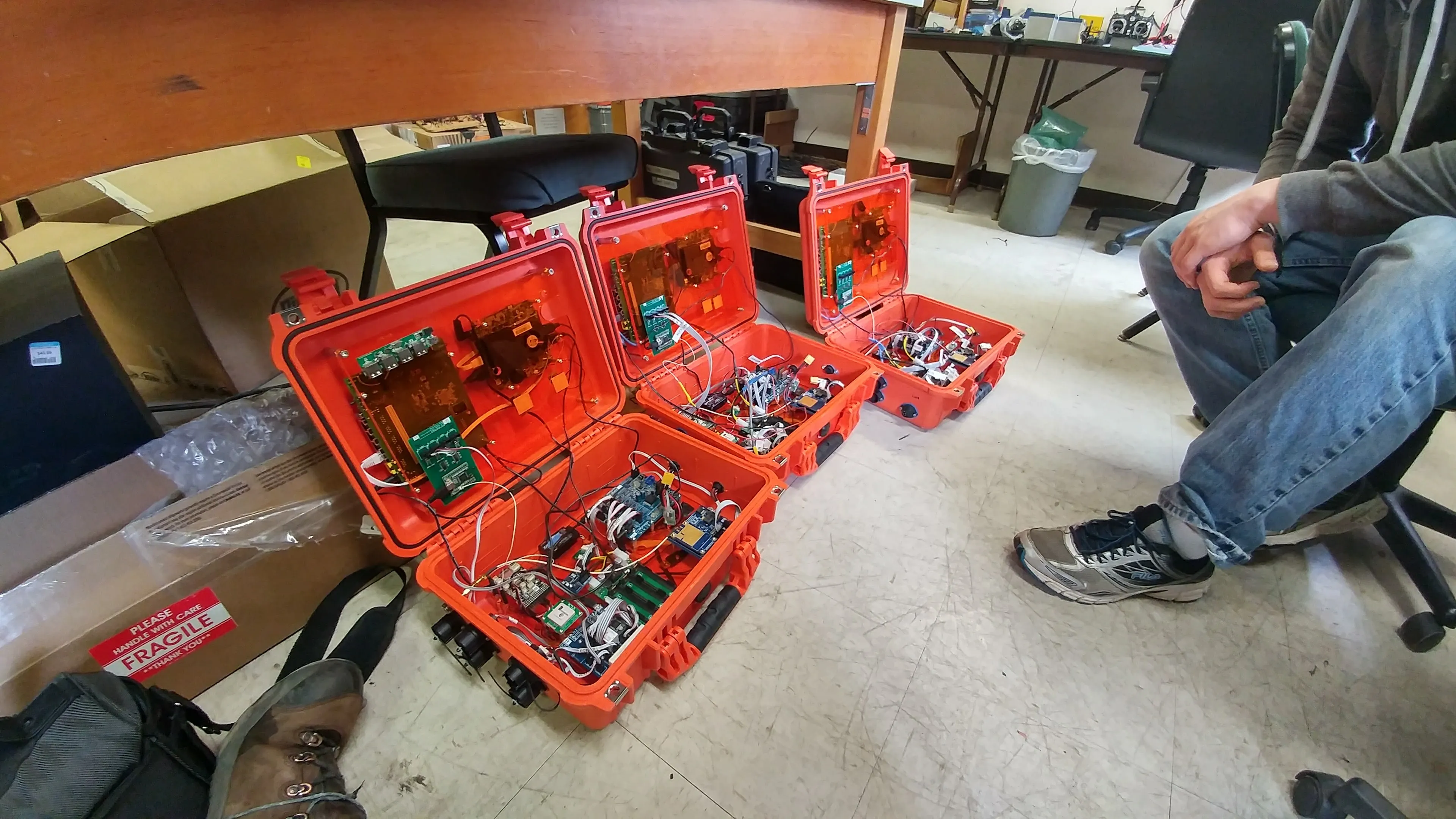
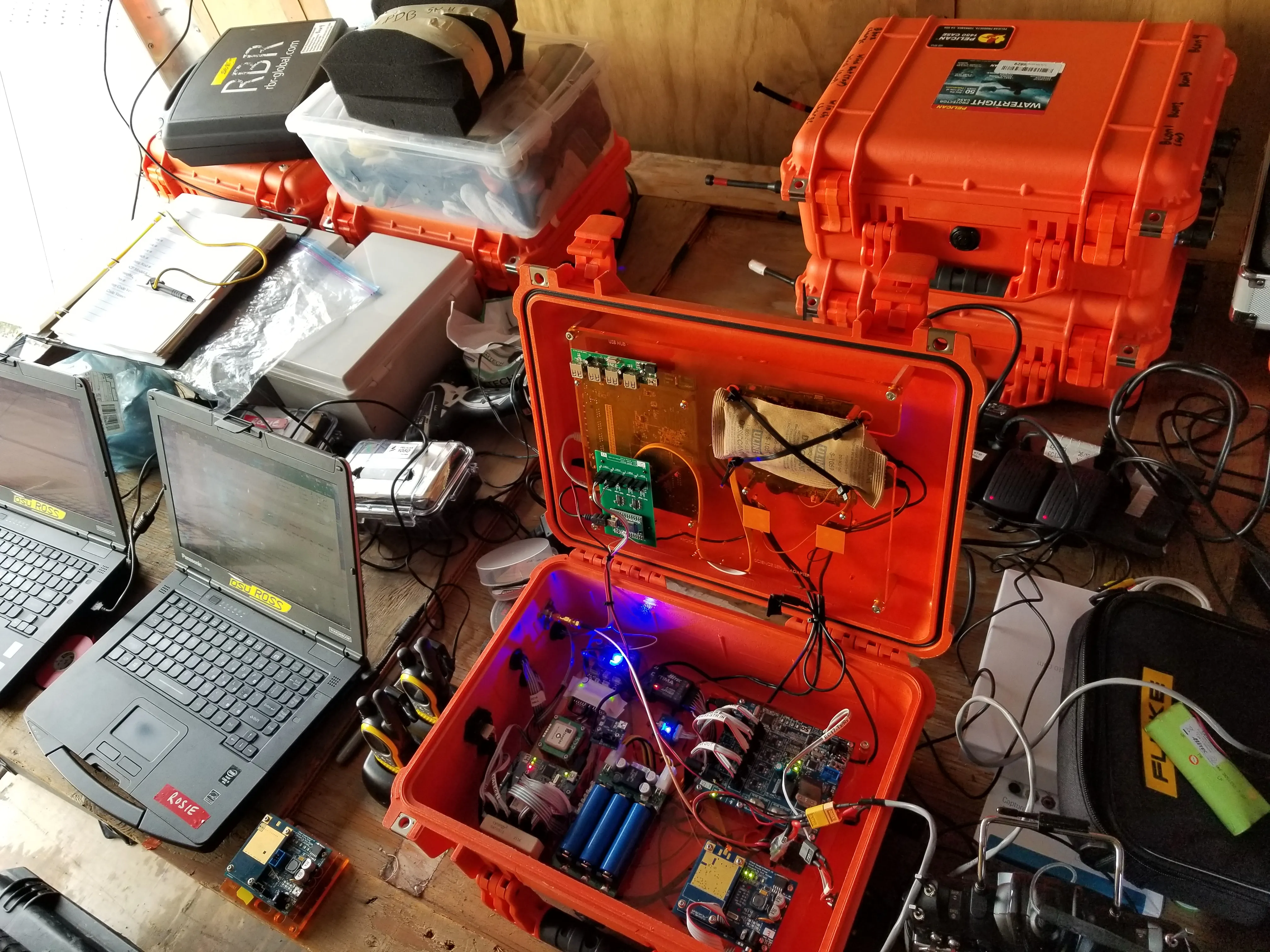
existed). One pelican-case electronics box housed this controller, a
small NUC with UPS, wifi router, radio control receiver, satellite modem, and quite a
few custom PCBs for interfacing with external
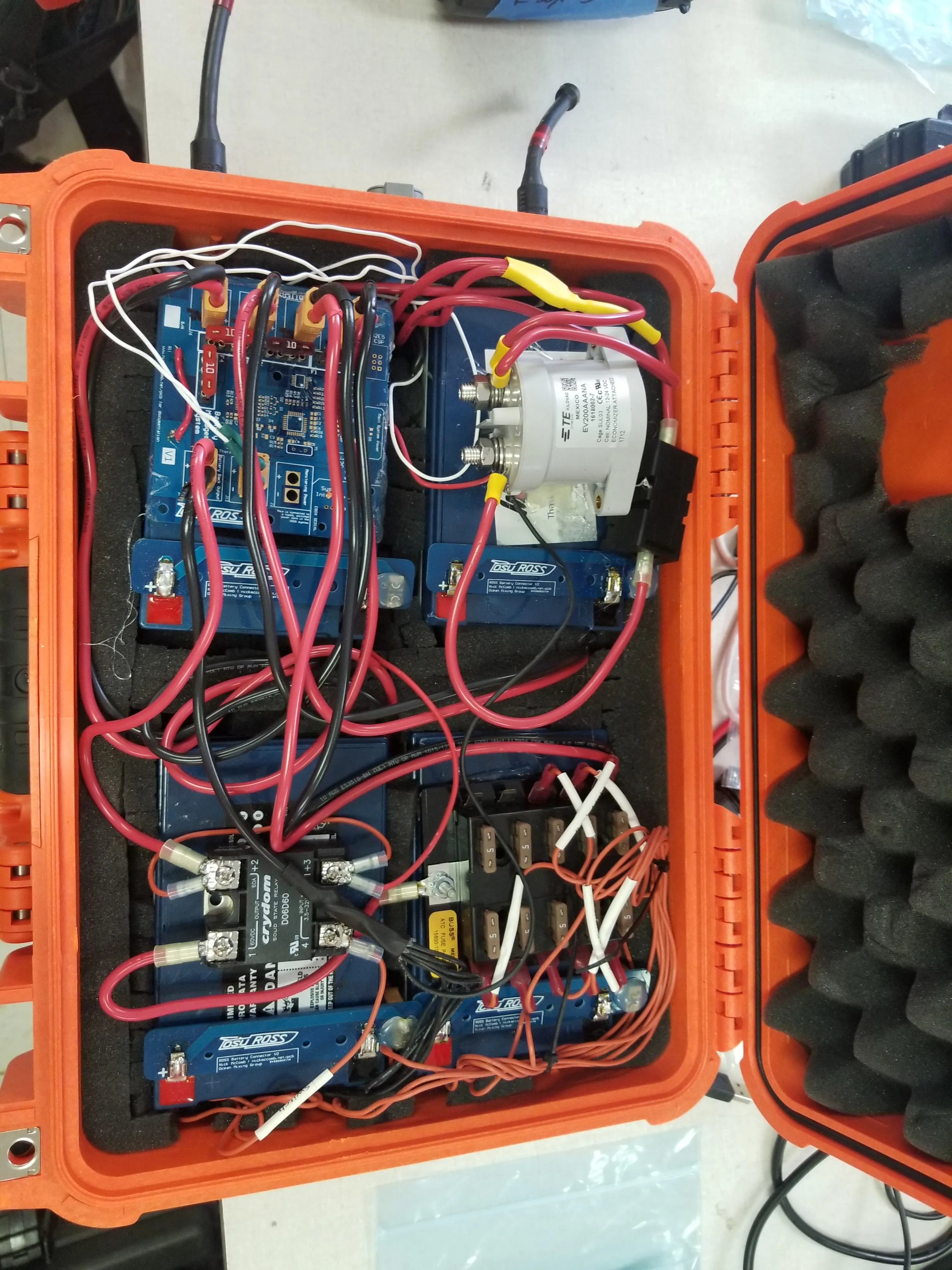
electronics and implementing glue logic/safety overrides. A second box housed
nothing but sealed lead-acid batteries, which were charged by the alternator
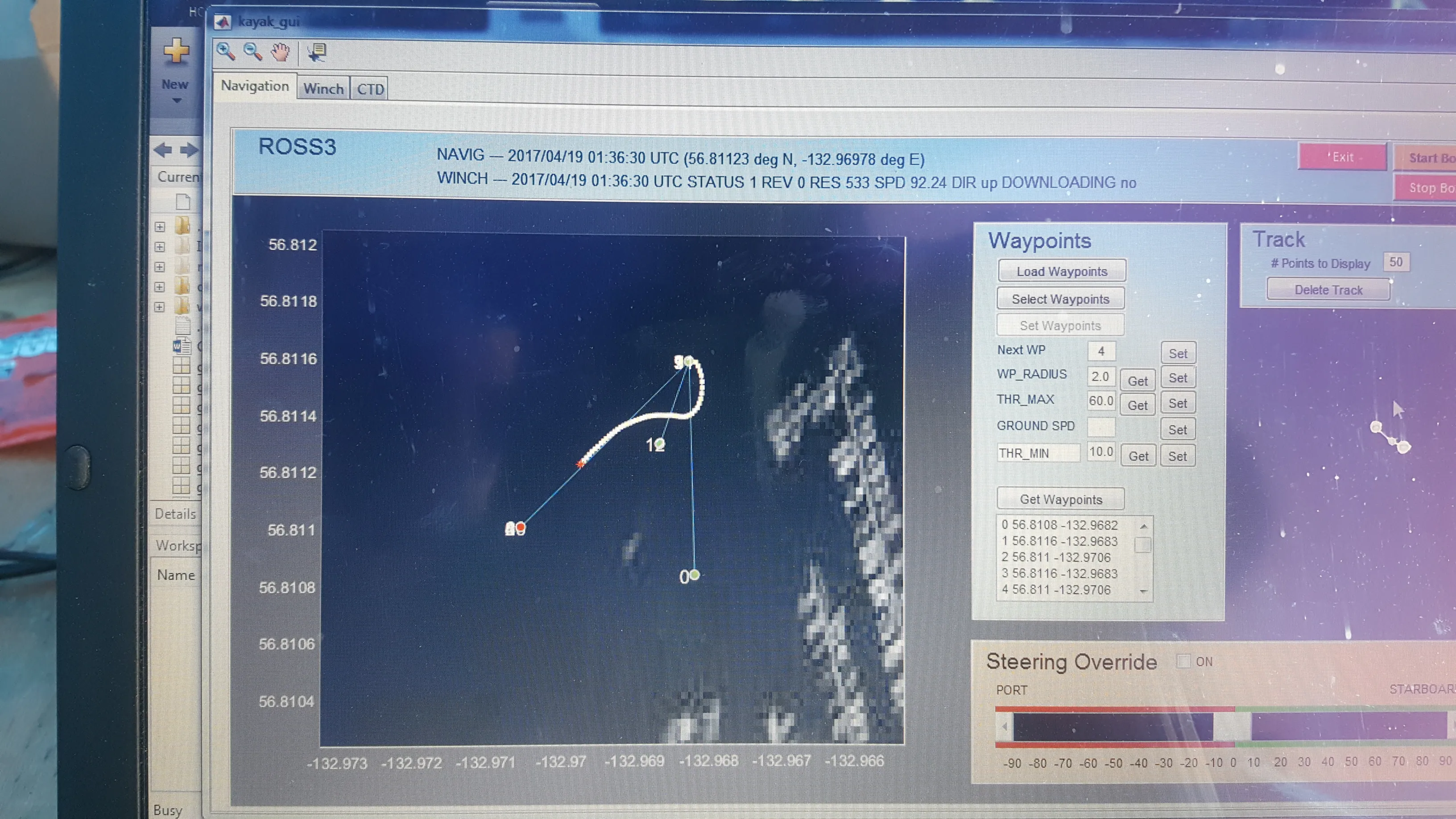
on later revisions of the platform. The PC ran a custom python script, which
interfaced with a Matlab GUI over a remote radio link. The kayak could also
be overridden with an FrSky RC controller, when at close range, and additionally
allowed for direct control without the PC needing to be in-the-loop. To
see some of the custom hardware inside of these boxes, check out Nick McComb's
design pages for them
here! For even more context on ROSS, and history from before I joined the
project, check out his summary page.
NUC
A small and low-power computer made by Intel
UPS
Uninterruptible power supply
PCBs
Printed circuit boards
My Experience
I first started on this project by doing what I thought was a one-off
help session for Nick, working on an issue he was having getting
ROSS's engine to start and shut down properly. I had more experience
with engines, and engine control, so I quickly realized that a beefier
and high-voltage-rated relay was needed to avoid arc-welding the
contacts closed during shutdown. He rolled out a new board revision with those changes and it was the final version used for the rest of ROSS's
lifetime. This little taste of the project, and some wishful prodding from
Nick, was enough for me to join the team part-time.
While the original plan for me was to re-write the GUI for ROSS in Python using Qt, it turns out they needed my help on the
electrical and firmware side more than anything, so most of my time at the
lab was focused on that. I hand-assembled so many of Nick's circuit boards
at this lab that I still can pick his out of a lot from design aesthetic
alone! I also helped with plenty of wiring harness builds, electrical box
fabrication, embedded firmware development, and of course, plenty of electrical
and software debugging. One thing that this project taught me very quickly
was how difficult it was to make reliable hardware in a high vibration,
electrically noisy, and salt-laden environments. The number of PCBs we went
through, alongside wiring harnesses, was pretty incredible considering the
lengths we went to in order to protect them.
GUI
Graphical user interface
A very unique aspect of this team/project, and a large part of why I
was drawn to it, was that it was about as hands-on as you could
possibly get. Doubly so for an undergraduate student! Not only did I
get to design and repair a real robot, but it was actually being used
for proper scientific research! We would regularly go to Newport, OR
for testing and have to make crazy additions and repairs on the fly.
This got even more extreme during my deployments to the LeConte glacier, as you had to get creative and fix things with what you had on-hand
due to how remote we were. These are experiences that graduate
students rarely even get to have, so I'm extremely thankful and fond
of the time I spent here. Huge shout out to Nick, again, who made it possible in the first place! Also be sure to
check out the scientific paper on this project below!